Upgrading My Self Hosted Maps with Headway
December 11, 2022
8 min read
Previously
I recently created a new project1 that connects some existing services via docker-compose to create a self-hosted alternative to Google Maps. I wrote about this in my previous blog post. This kicked off some great discussions2 on Hacker News and Reddit.
One of the things I appreciate about these discussions is that they frequently question the approach being used and suggest improvements.
This almost seems like an extension of Cunningham's Law: "The best way to get the right answer on the Internet is not to ask a question; it's to post the wrong answer."
In this case, I set up a whole project for the wrong answer. But, I did learn a lot doing it, and that's what really matters.
Here I'll tackle some of the questions that were raised with my initial approach:
Why use raster tiles?
This was a great point that I hadn't even considered. Most "slippy maps" use tiles to trick you into thinking that you have a single map that you can drag, zoom, and explore. But behind the scenes, you have small squares of map that get seamlessly tessellated into a large map by the frontend.
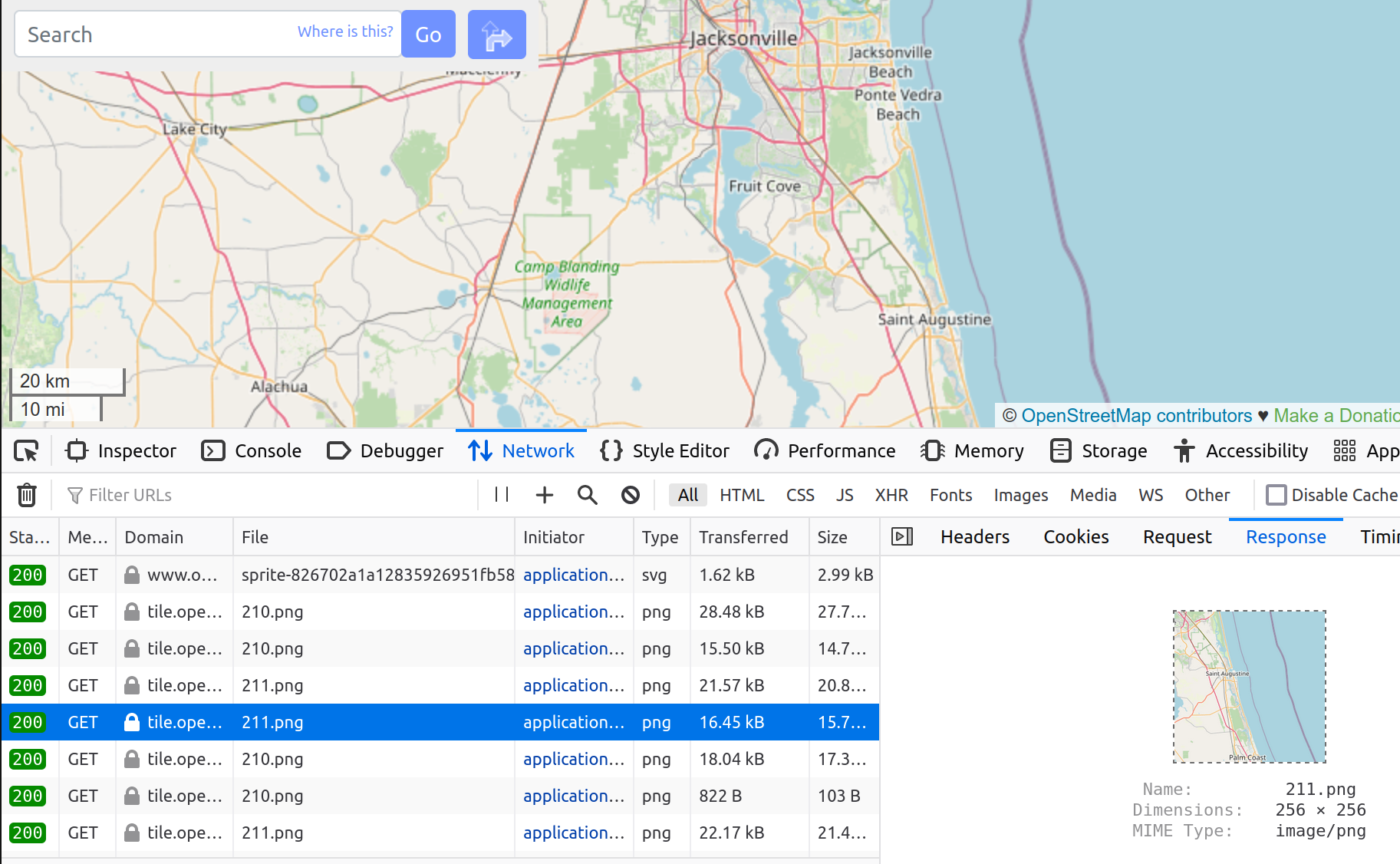
You can see behind the facade by opening the
network tab in the browser's developer tools.
What looks like one big map is actually composed of 256x256 PNGs.
These are raster tiles.
Raster tiles are rendered on the server and sent directly as images.
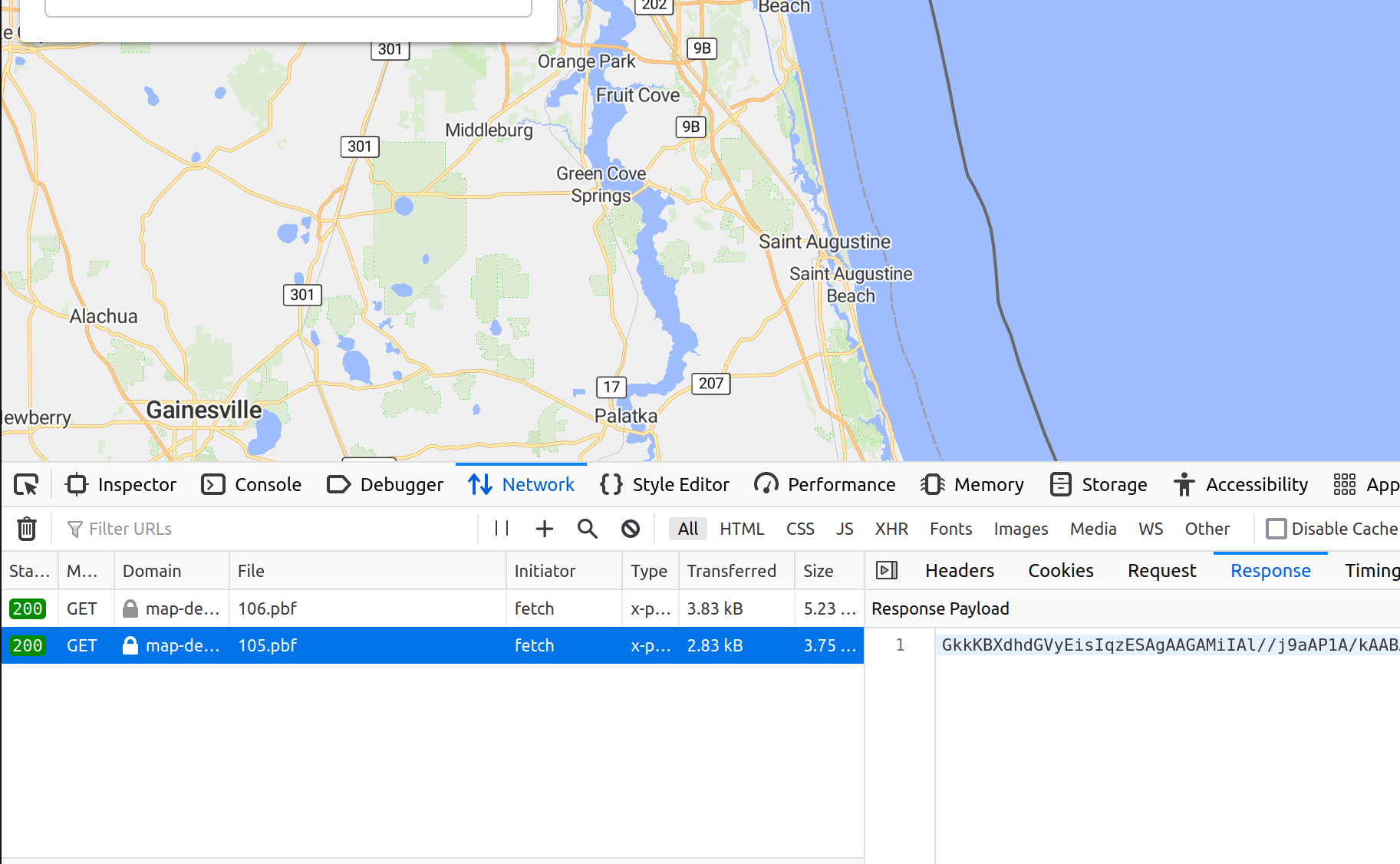
Maps can also use vector tiles, meaning the squares sent to you are not images, but rather binary data representing vectors for each linear feature (roads, for example). Then the client renders these into images that compose the map.
Here's a similar screenshot of network traffic when viewing a map
that uses vector tiles. The response is not a PNG image, but
binary encoded vector data (using protobuf encoding,
indicated by the pbf extension).
The tradeoffs are:
- vector tiles are much smaller (20%-50% of the size)
- vector tiles require fewer server resources (memory and storage)
- raster tiles need less client computation, so they're more accessible to low-end devices
Based on my constrained server hardware, I'm definitely interested in exploring vector tiles.
Why use nominatim?
Another question discussed was the use of geocoding service. A geocoder takes a query as input, like "101 Main Street Chicago IL" and returns possible locations corresponding to that query. This is obviously an important service for a map webapp, because users need a way to find things!
Nominatim is the geocoder used by openstreetmap.org, so it was the default in my mind. However, its performance in terms of hardware and search results leaves much to be desired. Nominatim's architecture relies on a rigid address scheme, and so Elasticsearch also provides more flexibility in search results.
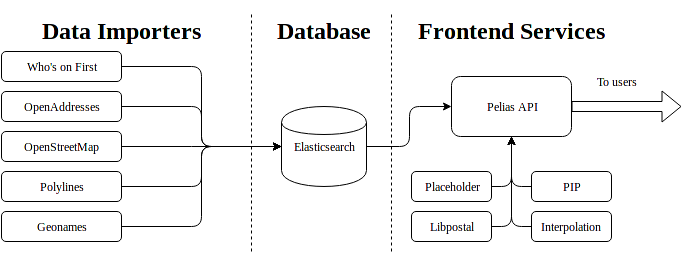
Elasticsearch, a full-text search engine was developed for full-text searching document databases, but has been adapted for use on OpenStreetMap data in many projects, including Pelias.
This architecture diagram from the Pelias docs shows how Elasticsearch is leveraged to handle search queries on a given dataset.
In Qualitative Comparison of Geocoding Systems using OpenStreetMap Data, Konstantin Clemens compares the performance of Nominatim against Elasticsearch. Elasticsearch basically blows Nominatim out of the water on index size and search performance on Nominatim's own dataset.
Nominatim uses ~20x more data and can't perform at all when address details are shuffled (e.g. not following a standard address order).
Knowing all this, switching geocoders is another obvious improvement.
How to handle data updates?
The canonical OpenStreetMap data file is updated on a weekly cadence with the newest user contributions to the map. For many applications, it's not practical to re-run the import process (which generates hundreds of GB) every week, because it takes too long. Instead, projects allow a diff to be processed, so that weekly updates don't require importing from scratch.
The services used in docker-openstreetmap-stack do allow for managing updates, but I didn't explore them much, because this was more of a one-off project.
Headway
Headway3 is a map stack that conveniently addresses the first two of these issues. It uses Pelias4 for geocoding, which is based on Elasticsearch. It uses tileserver-gl5 for serving vector tiles. Currently, Headway has data update support as a requested feature, but it's not yet implemented.
But to quote Meat Loaf, "two out of three ain't bad"6, so I went ahead and set up my own Headway system at map-demo.wcedmisten.dev. This demo is using the North America OSM extract.
I probably should have investigated Headway before rolling my own version of it, but I was previously under the impression that it was only suitable for city-sized OpenStreetMap extracts. This is not the case, and it can be used for a full planet map. For example, maps.earth runs on Headway.
The networking configuration (DDNS, router port-forwarding, certbot) was all re-usable from my previous post, so all I had to do was run the Headway project and change the port used in my nginx config.
The only hitch I ran into was that importing the North America extract (11.9 GB) kept timing out during the Pelias import step. Increasing the timeout limit from 30 seconds to 10 minutes fixed this for me. I've also put up a Pull Request7 for this change.
Server Performance
Headway is noticeably smaller than my homemade stack:
docker system df -v
VOLUME NAME LINKS SIZE
headway_tileserver_data 2 18.46GB
headway_valhalla_data 2 18.92GB
headway_pelias_config_data 3 1.073kB
headway_pelias_elasticsearch_data 2 16.34GB
headway_frontend_data 2 3.551MB
headway_pelias_placeholder_data 2 1.043GB
For a total storage of just 55 GB. This was down from 667 GB from docker-openstreetmap-stack running on North America.
Itemized improvements:
- tile server: 338GB -> 19GB
- router: 38GB -> 19GB
- geocoder: 292GB -> 16GB
It also only uses ~6GB of RAM at runtime, compared to 28GB of RAM at runtime previously.
Client Performance
Despite my low expectations around client performance of vector maps, I actually noticed a large performance improvement due to the speed at which vector tiles were rendered. When self-hosting raster tiles, there was a noticeable delay when tiles were first rendered, even as long as a minute. But with vector tiles, the first-render time is almost unnoticeable. Normally caching tiles would make this difference negligible, but due to low traffic, the tile cache is cold and very slow to serve tiles because the server needs to render them first.
When zooming in to dense urban areas with lots of features, there can be some lagginess panning around, even on my relatively recent 2018 Android (OnePlus 6T).
I also noticed that Firefox handles vector maps much worse than Chrome. There was none of this lagginess noticeable when visiting the same places in Chrome. This issue was also discussed in a blog post8, although it didn't really address the possibility of this being browser-specific. There is also a Mozilla issue mentioning this performance degradation on Firefox vs. Chrome here.
In any case, I found this tradeoff to be acceptable for my hobbyist use-case, especially considering the order of magnitude performance and storage improvements made with the tradeoff.
My plan with this map server is to use it for upcoming projects that involve visualizing map data in the browser.
Demo User Interface
The frontend interface was not too important to me, because
I plan on making my own visualizations that don't use the
default webapp client. However, there were some features that
I missed from the valhalla-app demo client:
- No Isochrones
- The turn-by-turn UI shows fewer details than valhalla-app
- Fewer customization options for the router
There were also some improvements:
- alternate routes are shown in addition to the main route
- location search has autocomplete, and is generally more accurate thanks to Pelias
Conclusion
Headway has been an awesome project to start using, and it's clearly the effort of some passionate developers. It really pushes the boundaries of self-hosting by reducing server hardware requirements and improving performance.